非線形過渡解析による制御システム解析
逆さ倒立振り子の制御
事例概要
逆さ倒立振り子の制御は、制御工学の初歩的な課題のひとつです。NX Nastranでは伝達関数を定義することによって解析モデルに制御系を組み込むことができます。この機能を利用して、1mのアルミ棒を逆さ倒立振り子として、先端にインパクトを与えた後の運動を解析しました。
逆さ倒立振り子の制御には、アクチュエータを使用します。アルミ棒は弾性をもつ棒としてモデル化します。
この例では先端部分の運動を計測し、制御入力としました。
制御系は、先端の傾斜角度と位置をもとにPID制御を組み込みました。
アクチュエータも一次遅れ系としてモデル化しています。
これらの定義はごく簡単にできます。
定在波 - 等音圧面表示(Isosurface)
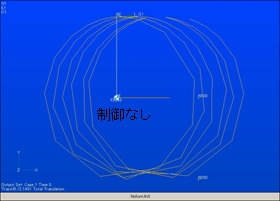
制御しない場合の運動(t=0~15秒)
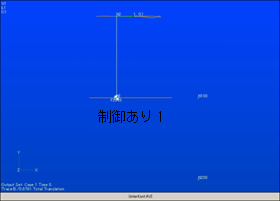
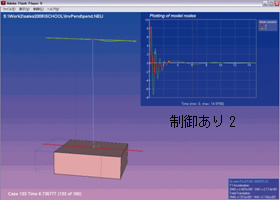
制御した場合の運動(t=0~15秒)
動作ムービー
製品に対してのご質問、製品導入のご相談等は、お問い合わせフォーム または 東京本社 へご連絡下さい。